Industrial robots [Gantry robots, arm robots, and many more]
Mentors: Kevin Hull and Nishant Unnikrishnan
At Yaskawa the applications engineering teams are responsible for making some cool robotics demos. On this team I helped develop a motion planning library used for various applications of industrial robots.
I mostly ran my code on the following gantry robot that was presented at a trade show.
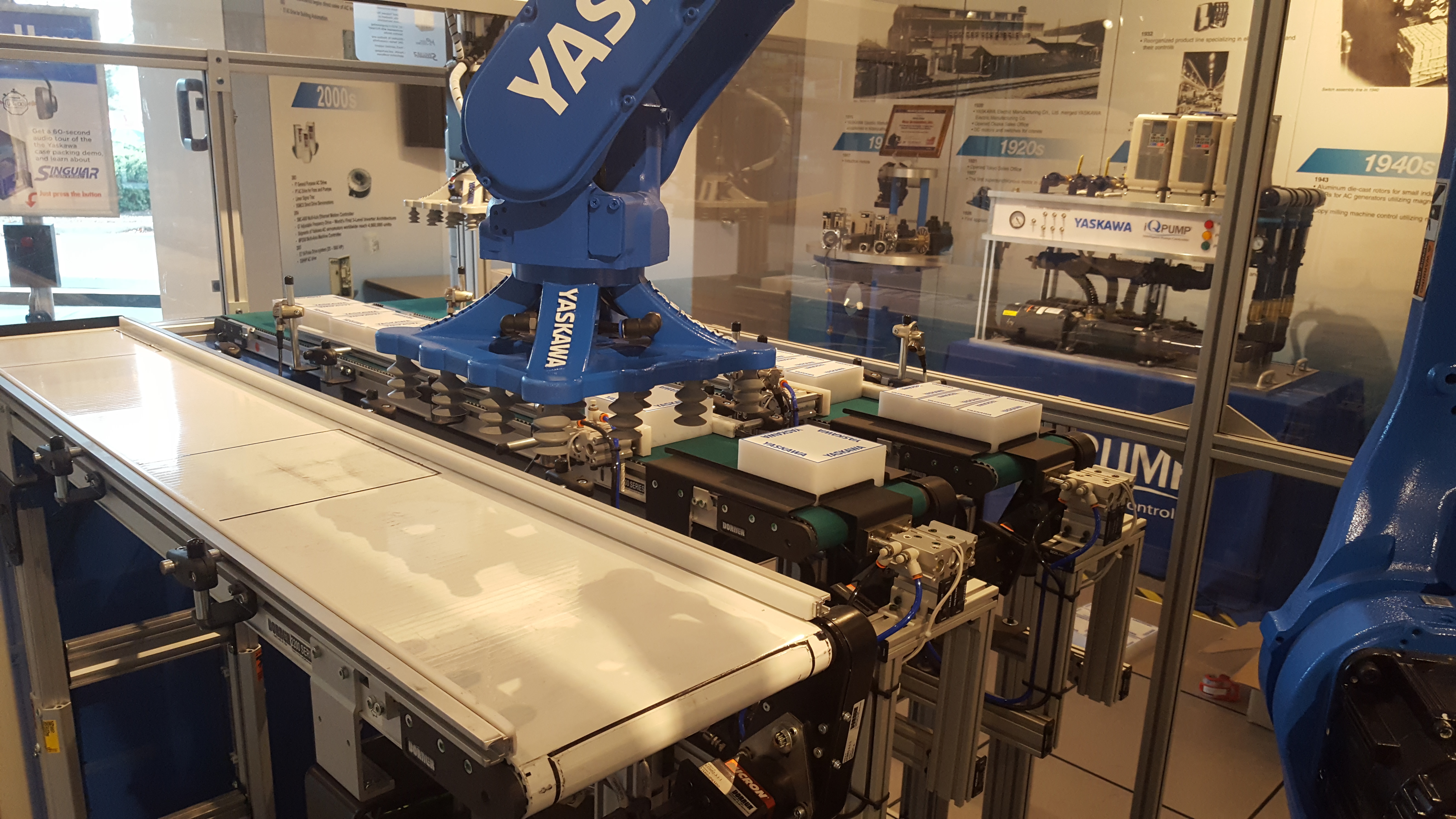
Another system that I would test my code on was a robot arm demo that was designed to use its suction cups to grasp onto blocks from the green conveyor belt and pack them into a square on the white conveyor belt.
A cool extension of the prototype gantry robot was on a gigantic 3D printer with a robot arm at one end that I helped a customer debug. The final demo of this project had the gantries 3D print a boat.
I have some further experience with factory robotics from when I did a separate internship at a plastic injection molding factory. That experience gave me some good experience in human-robotic interactions in an industrial setting as well as some insight into the lack of computer vision in industrial robotics processes.